スキップしてメイン コンテンツに移動
検索
このブログを検索
kikaiken weblog
このブログは機械研の開発日記です。
投稿
2007の投稿を表示しています
すべて表示
12月 11, 2007
N.F. 2007
11月 19, 2007
マイクロマウス全日本大会に参加
11月 17, 2007
調整中
11月 05, 2007
今後の課題
11月 05, 2007
マイクロマウス全日本学生大会
10月 30, 2007
マイクロマウス中部地区大会
10月 26, 2007
もうすぐ中部地区大会
9月 23, 2007
スラローム 速度と摩擦係数
9月 22, 2007
エッジ検出
9月 15, 2007
横センサの配置
9月 14, 2007
斜めセンサの配置
9月 11, 2007
前センサの配置
9月 11, 2007
技術賞 受賞!
9月 04, 2007
プリント基板
8月 29, 2007
マウスのシーズン
8月 21, 2007
レスコン本戦終了
8月 09, 2007
レスコン本選のお知らせ
7月 09, 2007
第7回レスキューロボットコンテストに出場しました
7月 06, 2007
レスコン予選のお知らせ
7月 04, 2007
部内ロボコン開催
6月 28, 2007
知能ロボコンに行ってきました!
6月 28, 2007
知能ロボコン当日
6月 22, 2007
知能ロボコンに向けて
5月 20, 2007
ロバート君
5月 15, 2007
Dii
5月 06, 2007
アームに手を加える
5月 03, 2007
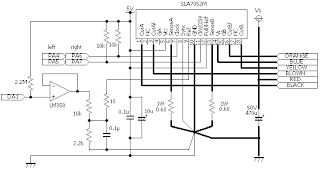
ステッパーモータドライバ
4月 27, 2007
5月分新歓日程
4月 20, 2007
部内ロボコンを開催します
4月 13, 2007
全体像が見えてきた
4月 10, 2007
BuCUE
4月 09, 2007
こじまうす2復活
4月 05, 2007
お花見だッ!
4月 05, 2007
紅萌ゆる
4月 05, 2007
エネループ
4月 03, 2007
4月分新歓日程
4月 03, 2007
散歩中
3月 31, 2007
SLA7052の破壊原因
3月 29, 2007
こじまうす2負傷
3月 27, 2007
動いて一安心
3月 26, 2007
動くかな?
3月 21, 2007
こじまうす2改良計画
3月 18, 2007
DCモータをまわす
3月 16, 2007
こじまうす3
3月 15, 2007
マイクロマウス2007
3月 15, 2007
失敗 失態
3月 07, 2007
レスコン作業中
2月 26, 2007
製作中
2月 24, 2007
第7回レスキューロボットコンテストに出場します
2月 13, 2007
2月 11, 2007
公式ブログ始めました
新しい投稿
ホーム