部内ロボコン2017
どうもweb係(ブログ係?)のMです。
部内ロボコンが6月18日に開催されました。このままテスト期間に移行して放置状態になる前にブログを書いておこうと思います。今年もたくさんの新入生が入ってくれて楽しんでくれたと思います。また僕たち上回生も見ていてとても楽しませてもらいました。徹夜で完成させるチーム、機体が母艦と子機に分かれている探査機のような機体を作ったチーム、ワークを投げることができるチームなど、やっぱりチームごとに個性があふれているなと思いました。
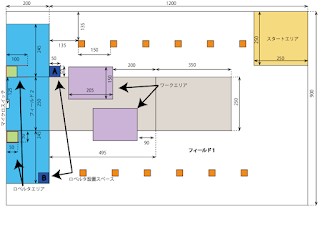
今年のルールは去年の部内ロボコンのルールに加えて我が機械研の公式マスコットロベルタを特定のエリアに入れたら5点が追加されるというものです。
今年のルール:(ざっくり)
・フィールドのワークを集めてワークエリアに入れるとワーク一1個につき1点が入る。
・また橋をフィールドのワークを取って橋を補完して渡るとワークの点数が2倍になる。
・追加課題としてロベルタを特定の場所から、ロベルタエリアに入れると5点が追加される。
・点数が同じ場合にはタイムが早いほうが順位は上とする。(制限時間は5分)
今年の機体を紹介していきます。
①Aチーム
スタートエリアいっぱいに収まる機体。母艦の上に子機が2台乗っており、スタート同時に射出されて、左右でワークをエリアに押し込んだ後は子機についた磁石でロベルタを回収して子機ごと紐で母艦に回収して橋を渡ります。
1台のコントローラを2人で操縦していたので操作がとても大変そうでした。
機体名はその名も「空母カールビンソン」

②Bチーム
取る機構が独特なチーム。リンク機構で上手にロベルタを羽交い絞めするようにつかめます。ロベルタ「く、苦しい...」

③Cチーム
徹夜で完成させたチームです。本来はテオヤンセン機構で歩く機体だったようですが、諸事情によりこの機体に。機体名に僕の名前を付けてくれました。徹夜でデバッグ手伝ったかいがあり、うれしかったです。

④Dチーム
ロベルタを取る機構がどこも個性的でした。このチームは布を上昇機構に使ってました。しかもタイヤ間距離が4センチしかないためワークがなくても橋をわたることができます。旋回速度が半端なく速かったです。4センチの橋を4センチのタイヤ間距離でわたって
いましたが相当練習したのだと思います。

⑤Eチーム
今年の優勝チームです。つかむ機構が王道の開閉式キャッチャーです。
しかもハンドリングにワークをできるだけ遠くの距離から投げ入れる(!?)モードとロベルタをできるだけ優しく置くモードの2つがあり、ソフト面でもとても強いチームでした。しかも完成がとても早くて大会3週間前くらいから練習していました。
去年の制限時間(3分)でもタイムアウトにならないという驚異のスピードハンドリングでした。

⑥Fチーム
この大会一番のダークホース。機構がとてもメカメカしています。高枝切りばさみの要領でワイヤー駆動でアームの先のハンドを開閉します。また下部に小型の車体がありDチームと同じようにワークがなくても橋を渡ることができます。機構がとても面白いということでOB賞を受賞しました。


ロベルタイナバウアーーー!!
⑦Gチーム
このチームはワイドなワークキャッチャーと後ろのロベルタを取る非常に攻撃的なフォークが特徴です。前のワイドなキャッチャーは橋を渡るときに坂でつっかえないように紐で引っ張って畳み上げます。


今年も前期は主なイベントは終わりました。この後はテストですね。そしてテスト明けにはキャチロボが始まります。
それではテスト後にまた会いましょう。アディオス!!
部内ロボコンが6月18日に開催されました。このままテスト期間に移行して放置状態になる前にブログを書いておこうと思います。今年もたくさんの新入生が入ってくれて楽しんでくれたと思います。また僕たち上回生も見ていてとても楽しませてもらいました。徹夜で完成させるチーム、機体が母艦と子機に分かれている探査機のような機体を作ったチーム、ワークを投げることができるチームなど、やっぱりチームごとに個性があふれているなと思いました。
今年のルールは去年の部内ロボコンのルールに加えて我が機械研の公式マスコットロベルタを特定のエリアに入れたら5点が追加されるというものです。
今年のルール:(ざっくり)
・フィールドのワークを集めてワークエリアに入れるとワーク一1個につき1点が入る。
・また橋をフィールドのワークを取って橋を補完して渡るとワークの点数が2倍になる。
・追加課題としてロベルタを特定の場所から、ロベルタエリアに入れると5点が追加される。
・点数が同じ場合にはタイムが早いほうが順位は上とする。(制限時間は5分)

今年の機体を紹介していきます。
①Aチーム
スタートエリアいっぱいに収まる機体。母艦の上に子機が2台乗っており、スタート同時に射出されて、左右でワークをエリアに押し込んだ後は子機についた磁石でロベルタを回収して子機ごと紐で母艦に回収して橋を渡ります。
1台のコントローラを2人で操縦していたので操作がとても大変そうでした。
機体名はその名も「空母カールビンソン」

②Bチーム
取る機構が独特なチーム。リンク機構で上手にロベルタを羽交い絞めするようにつかめます。ロベルタ「く、苦しい...」

③Cチーム
徹夜で完成させたチームです。本来はテオヤンセン機構で歩く機体だったようですが、諸事情によりこの機体に。機体名に僕の名前を付けてくれました。徹夜でデバッグ手伝ったかいがあり、うれしかったです。

④Dチーム
ロベルタを取る機構がどこも個性的でした。このチームは布を上昇機構に使ってました。しかもタイヤ間距離が4センチしかないためワークがなくても橋をわたることができます。旋回速度が半端なく速かったです。4センチの橋を4センチのタイヤ間距離でわたって
いましたが相当練習したのだと思います。

⑤Eチーム
今年の優勝チームです。つかむ機構が王道の開閉式キャッチャーです。
しかもハンドリングにワークをできるだけ遠くの距離から投げ入れる(!?)モードとロベルタをできるだけ優しく置くモードの2つがあり、ソフト面でもとても強いチームでした。しかも完成がとても早くて大会3週間前くらいから練習していました。
去年の制限時間(3分)でもタイムアウトにならないという驚異のスピードハンドリングでした。

⑥Fチーム
この大会一番のダークホース。機構がとてもメカメカしています。高枝切りばさみの要領でワイヤー駆動でアームの先のハンドを開閉します。また下部に小型の車体がありDチームと同じようにワークがなくても橋を渡ることができます。機構がとても面白いということでOB賞を受賞しました。


ロベルタイナバウアーーー!!
⑦Gチーム
このチームはワイドなワークキャッチャーと後ろのロベルタを取る非常に攻撃的なフォークが特徴です。前のワイドなキャッチャーは橋を渡るときに坂でつっかえないように紐で引っ張って畳み上げます。


今年も前期は主なイベントは終わりました。この後はテストですね。そしてテスト明けにはキャチロボが始まります。
それではテスト後にまた会いましょう。アディオス!!


コメント
例年のごとく、徹夜したチームもあり、お疲れ様でした。写真でユニークな
機体を見ることができ、良かったです。