合同ロボコン!
9月18日(火)に合同ロボコンが開催されました。
関西圏の大学のロボットを制作している団体が集まり、技術を高めることと交流を深めることを目的としたロボコンです。
昨年までは機械研が主催でしたが、主催校を回すことになった今年は立命館さんの開催で、立命館大学びわこくさつキャンパスで行われました。
参加校は京都大学、大阪大学、京都工芸繊維大学、立命館大学、同志社大学の5校です。
それぞれ個人、またはチームで初級者も上級者も制作を楽しめる「ライントレーサー」と呼ばれるロボットを制作し、フィールドに白線で描かれたコースを自律的に走る速さを競いました。
個性的でおもしろいロボットが次々と登場し、おおいに盛り上がりました。
今回使われたコースの写真です。

競技は「一回生の部」「上回生の部」「院生の部」にわかれており、各部ごとに走行タイムによる1~3位が入賞し、また、全体の中で優れたアイデアが光っていたものに「アイデア賞」が送られます。
機械研からは「一回生の部」に4機、「上回生の部」に二回生から1機が出場しました。
一回生にとっては初めて一人でつくったロボットであり、初めてのロボコンになります。
二回生から出場の「にぃ」は二足歩行でのライントレースに挑戦しました。
タイヤで走るトレーサーに比べてスピードが出せず完走することはできませんでしたが、そのひょこひょこと歩く様子に会場がわきました。
さて、機械研からはタイムによる入賞者は出ませんでしたが、一回生の部に出場したライントレーサー「JITEN」が投票によって選ばれ、アイデア賞を受賞しました。
一般的なライントレーサーは前方にラインを認識するセンサーを横にならべ、そのうちどのセンサーがラインを認識しているかによって機体とラインとの位置関係を把握します。
ところがこの「JITEN」、そのような方式ではなく全く別の方法でラインを追従したことが評価されました。
これからその方式について説明します。
こちらがそのJITEN。
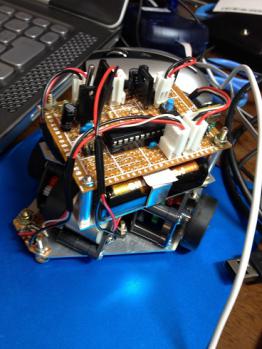
裏はこんな感じになっています。

オレンジの○で囲ったのがラインを見るセンサーです。
緑の○で囲ったねじはセンサーより少し出っぱっていて、2つのタイヤとこの2本のネジの頭で機体を支えています。
そして、実際に動いているところの動画がこちらになります。
これは学校で撮影したものです。
名前の“JITEN”は惑星などの“自転”から取っています。
コースを大きく回るのを“公転”と見たてると、機体の回転は自転になりますね。
こいつの動きについて図で説明します。
まずは基本的な動きについて図①に。
青と水色の長方形が機体で、赤い●はラインセンサです。
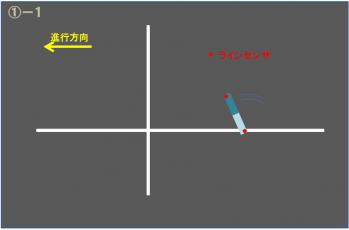
こうやって回って、
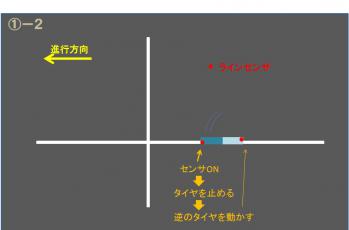
ラインを読んだら動かすモーターを切り替えてまた回る。
これが基本です。
しかし、このままだと十字路では違う道(図でいうと上)に進んでしまいます。
そこで登場するのが、このライントレーサーのキーワード、
“135度の壁”
です。
回転を始めてからセンサーが135度回転する位置を越えるまではラインを踏んでも無視します。
こうするとどうなるか説明します。
まずは十字路に135度以内でぶつかる場合。
まずは無視。
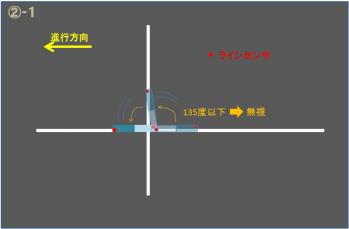
そして無視。
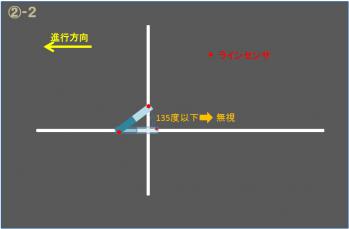
このようにコースから外れることはありません。
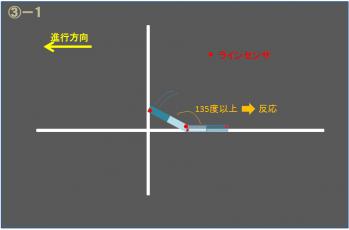
次に、十字路に135度を越えてぶつかる場合。
まずは反応。
そして動かすタイヤを切り替えた後は、
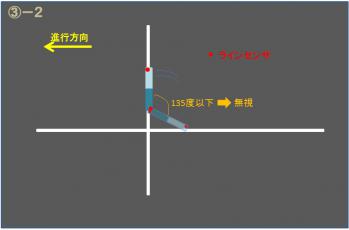
このように、間違えたコースにつくときにはまだ135度以下なのですね。
つまり、今度は無視して回り続けます。
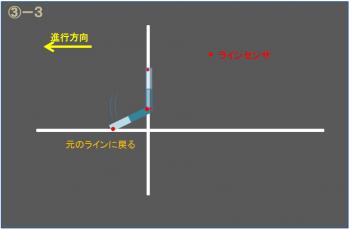
そしてもとの正しいコースに復帰するわけです。
このように、135度以下のラインを無視することで、十字路も乗り越えることができるわけです。
もし無視する基準の角度が135度以下であった場合、図③-2のような状況になった場合に縦のラインまでの角度が基準以上になってしまうため反応してしまうことになります。
しかし、実際のラインは19mmの幅があり、単純に135度で区切ればうまくいくわけではありません。
ラインに侵入するときは135度以下でも、ラインの外に出るまでに135度を越えたりします。
なので、無視する角度は大きいほど確実なわけですが、だからと言ってただただ大きくすればいいというものでもありません。
今回のルールでは、最小曲率半径は15cmなのです。
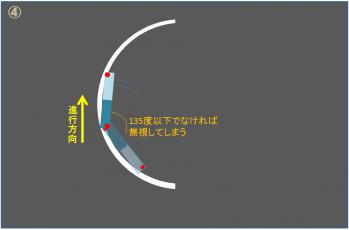
カーブの内側を進むとき、無視する角度以上でラインにぶつかれるようにしなければ進むべきラインを無視してしまうことになるのですね。
ラインの幅を考慮せずに計算した場合ですが、135度以上で半径15cmのカーブを曲がるためには、機体の回転する半径は約10.5cm以下でなくてはだめなのです。
ラインに幅があることによって実際には135度では足りず、より大きな角度を壁として設定しています。
JITENが自転する半径は約8.5cmで10.5cmより短いですが、それでも十字路を越えられて且つカーブも曲がれる角度というのはわずかな幅で調整が必要でした。
以上でJITENの説明を終わります。
打ち上げもあり、合同ロボコンでは他校の方とたくさん交流できました。
また制作を通してメンバー間の仲も深まり、メンバーがアイデア賞をいただいたことで機械研も盛り上がっています。
これからはマイクロマウスの中部地区大会や11月祭などもあり、メンバー一同これからもがんばっていこうと思います。
関西圏の大学のロボットを制作している団体が集まり、技術を高めることと交流を深めることを目的としたロボコンです。
昨年までは機械研が主催でしたが、主催校を回すことになった今年は立命館さんの開催で、立命館大学びわこくさつキャンパスで行われました。
参加校は京都大学、大阪大学、京都工芸繊維大学、立命館大学、同志社大学の5校です。
それぞれ個人、またはチームで初級者も上級者も制作を楽しめる「ライントレーサー」と呼ばれるロボットを制作し、フィールドに白線で描かれたコースを自律的に走る速さを競いました。
個性的でおもしろいロボットが次々と登場し、おおいに盛り上がりました。

競技は「一回生の部」「上回生の部」「院生の部」にわかれており、各部ごとに走行タイムによる1~3位が入賞し、また、全体の中で優れたアイデアが光っていたものに「アイデア賞」が送られます。
機械研からは「一回生の部」に4機、「上回生の部」に二回生から1機が出場しました。
一回生にとっては初めて一人でつくったロボットであり、初めてのロボコンになります。
二回生から出場の「にぃ」は二足歩行でのライントレースに挑戦しました。
タイヤで走るトレーサーに比べてスピードが出せず完走することはできませんでしたが、そのひょこひょこと歩く様子に会場がわきました。
さて、機械研からはタイムによる入賞者は出ませんでしたが、一回生の部に出場したライントレーサー「JITEN」が投票によって選ばれ、アイデア賞を受賞しました。
一般的なライントレーサーは前方にラインを認識するセンサーを横にならべ、そのうちどのセンサーがラインを認識しているかによって機体とラインとの位置関係を把握します。
ところがこの「JITEN」、そのような方式ではなく全く別の方法でラインを追従したことが評価されました。
これからその方式について説明します。
こちらがそのJITEN。

裏はこんな感じになっています。

オレンジの○で囲ったのがラインを見るセンサーです。
緑の○で囲ったねじはセンサーより少し出っぱっていて、2つのタイヤとこの2本のネジの頭で機体を支えています。
そして、実際に動いているところの動画がこちらになります。
これは学校で撮影したものです。
名前の“JITEN”は惑星などの“自転”から取っています。
コースを大きく回るのを“公転”と見たてると、機体の回転は自転になりますね。
こいつの動きについて図で説明します。
まずは基本的な動きについて図①に。
青と水色の長方形が機体で、赤い●はラインセンサです。

こうやって回って、

ラインを読んだら動かすモーターを切り替えてまた回る。
これが基本です。
しかし、このままだと十字路では違う道(図でいうと上)に進んでしまいます。
そこで登場するのが、このライントレーサーのキーワード、
“135度の壁”
です。
回転を始めてからセンサーが135度回転する位置を越えるまではラインを踏んでも無視します。
こうするとどうなるか説明します。
まずは十字路に135度以内でぶつかる場合。
まずは無視。

そして無視。

このようにコースから外れることはありません。
次に、十字路に135度を越えてぶつかる場合。
まずは反応。

そして動かすタイヤを切り替えた後は、

このように、間違えたコースにつくときにはまだ135度以下なのですね。
つまり、今度は無視して回り続けます。

そしてもとの正しいコースに復帰するわけです。
このように、135度以下のラインを無視することで、十字路も乗り越えることができるわけです。
もし無視する基準の角度が135度以下であった場合、図③-2のような状況になった場合に縦のラインまでの角度が基準以上になってしまうため反応してしまうことになります。
しかし、実際のラインは19mmの幅があり、単純に135度で区切ればうまくいくわけではありません。
ラインに侵入するときは135度以下でも、ラインの外に出るまでに135度を越えたりします。
なので、無視する角度は大きいほど確実なわけですが、だからと言ってただただ大きくすればいいというものでもありません。
今回のルールでは、最小曲率半径は15cmなのです。

カーブの内側を進むとき、無視する角度以上でラインにぶつかれるようにしなければ進むべきラインを無視してしまうことになるのですね。
ラインの幅を考慮せずに計算した場合ですが、135度以上で半径15cmのカーブを曲がるためには、機体の回転する半径は約10.5cm以下でなくてはだめなのです。
ラインに幅があることによって実際には135度では足りず、より大きな角度を壁として設定しています。
JITENが自転する半径は約8.5cmで10.5cmより短いですが、それでも十字路を越えられて且つカーブも曲がれる角度というのはわずかな幅で調整が必要でした。
以上でJITENの説明を終わります。
打ち上げもあり、合同ロボコンでは他校の方とたくさん交流できました。
また制作を通してメンバー間の仲も深まり、メンバーがアイデア賞をいただいたことで機械研も盛り上がっています。
これからはマイクロマウスの中部地区大会や11月祭などもあり、メンバー一同これからもがんばっていこうと思います。


コメント