NF2015 -- 最終日
ごきげんよう。No.9です。
ようやくまとまった時間が取れたので、最終日の様子をお届けします。
最終日は前日ほど人は来ないのかなと思っていたのですが、中々の盛況っぷりで大変驚きました。かなりこちらの人手が足りてなかった印象を受けました。しっかり対応できなかった皆さん、申し訳ありませんでした...もう少し1回生に手伝ってもらいたかったなぁ、というのが僕個人としての本音です。

残念ながらこの日も僕はずっとUFOの運営にべったりだったので、教室の詳しい様子は分かりません。ところでUFOはというと、ばっちり動かしていました。


UFOの集客効果は絶大です。何せ、吹き抜けにファンタジーの塊みたいなものが浮遊している訳ですから、違うフロアの人も沢山足を止めて眺めていました。これまで冗談抜きに地獄のような日々でしたが、やっと報われたと思えた瞬間でした。
最後に終了して片づけを始める前に、今年のNFで各自が持ち寄ったロボット達で記念撮影。

こうしてみると、展示台数に対して説明する人数が明らかにおかしかったことを実感しますね...もう少し人員投入する必要があると思いました。
少し話は逸れますが、片づけはあっという間に終わり、僕は四日ぶりに下宿にもどりました。しかし...荷物整理が終わって時計を見ると夜中の2時半。次の日は休みのハズですが大学の補講が1限(朝8時45分)から入っていました。下宿から通うことを考えても6時半には起きなきゃならない。でも、今寝たら確実に8時間は目覚めないとカラダが言っていたので、諦めて徹夜する羽目に...ホント、NFってオソロシイ。
来年に向けて更なる改善点も見つかったことですし、来年はどうなるのか今から楽しみです。
~一日数台、機体紹介~
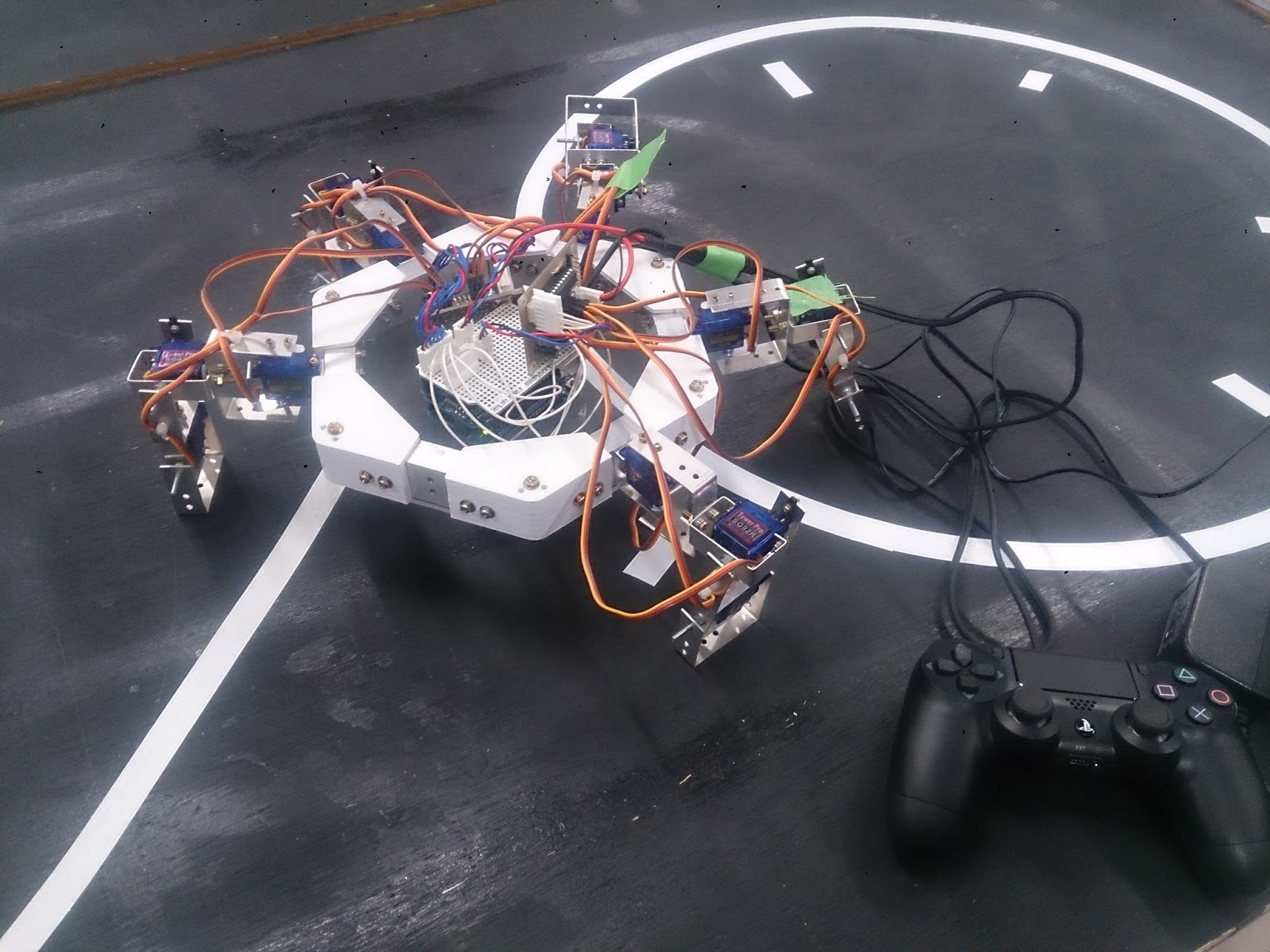
その①: 多脚ロボット Sechs

とある三回生が一人で作った多脚ロボット。実は6脚になる予定だったらしいですが、間に合わなかった模様です。名前の由来はドイツ語で6を表す単語です。それでも最終日には4本の脚で前後左右に歩き、もう一本の脚(見た目からすれば尻尾?)もちゃんと動きます。最新のプレイステーション4のコントローラによって操作が可能です。
その②: 汎用ヒト型決戦兵器 人造人間ヱヴァンゲリヲン 仮設初号機

3回生の二人組、Project Aによる製作。上半身はヱヴァ初号機、下半身はヱヴァ仮設伍号機と同じという、あまりにも特異なプロポーションです。ただ、金銭的な問題もあり、試験的に起動実験を行うにとどまった模様です。
上半身はKinectによって操縦者の動きを読み取り、操縦者はOculusを装着しヴァーチャルと現実との合成映像を見ることになると推測されます。下半身には足回りとしてオムニホイールを4つ装備しています。
一番驚くべきは、彼らは設計図を一切描かないこと。ペーパークラフトの要領で作ってしまうんです。今回も彼らのノートを少しのぞかせてもらいましたが、ラフぐらいしか載っていませんでした。キカイケンの中でも職人色の強いチームです。
Project Aは毎年面白いことをやってくれるのですが、今年はなんと展示教室の方にデスクトップ型パソコンと2台のディスプレイを持ち込んでいました。タクシーを使って持ってきたそうです。もう、僕は彼らの熱意にただ~脱帽するしかありませんでした...
その③: PEPA (Practice of Extraction colors for Picture Analysis)

とある3回生の製作です。名前の由来は「ヒラタペパ」という平べったい蛙に由来していて、上記の省略形ではないらしいです。キカイケンの大半の人がAVRなどのマイコンを使用する中、ただ一人 BeagleBone Black という、日本ではあまり馴染みのないシングルボードコンピュータを使用しています。有名なRaspberry Pi と同じようなものだそう。これにウェブカメラを搭載、Pythonというプログラミング言語でコーディングし OpenCV というソフトウェアで画像処理を行っています。
NF時には赤い物体に対して追跡する動作をさせていました。ただ、やはり処理が重いのか、左右方向に対する応答性が少し悪かったような印象を受けました。
その④: UFO_CATCHER MEGA

我らが京大機械研究会のシンボルといっても過言ではない、巨大UFOキャッチャーです。今年で6年目を迎えるにあたり、大幅に機体を改修。設計からやり直しました。その結果、機体の剛性は上がったのですが、今度は重量が約5kgと随分大きくなってしまいました。一応、僕が今年の大改修の現場指揮を行いました。
機体構成は大きく分けて、4階からUFOの基部を吊り下げているウィンチ部と、昇降及びものを掴むUFO本体の二台構成になっています。それぞれARMのSTMマイコンを搭載しZigbeeで通信しています。ハード、ソフト共に僕らの持つ最高技術の塊になっています。
しかし、NFの前日しかすべてのコンポーネントを繋いで動作確認することが出来ないこともあって、毎年良くて2日間しか動かせていません。来年は3日間動かせるのでしょうか?
ここまで書いてきて、写真や動画が少なすぎたことに気付きました...実際撮っている時間が全然無かったんですよ...
さて、なんとか毎回遅れながらも2015年度のNFについてレポートしてきました。毎年このような感じで波乱の連続です。自分の製作物が上手く動かず徹夜する人、ほかのサークルと掛け持ちをしているため忙しく動き回っている人など様々です。僕らのNFに対する心意気と言いますか、それに近いものが少しでも皆さんに伝われば幸いです。
これからも京大機械研究会をどうぞ宜しく御願いします。僕らキカイケンメンバーも、例え大学側のバックアップが無くても、例え他の大学と比較したら設備が劣っていようとも、キカイケンらしい着眼点と発想力でもっと「愉しいものづくり」を提案し続けようと思います。
今回のNF特集はここまでです。では、また別の機会にお会いしましょう。
(No.9)
ようやくまとまった時間が取れたので、最終日の様子をお届けします。
最終日は前日ほど人は来ないのかなと思っていたのですが、中々の盛況っぷりで大変驚きました。かなりこちらの人手が足りてなかった印象を受けました。しっかり対応できなかった皆さん、申し訳ありませんでした...もう少し1回生に手伝ってもらいたかったなぁ、というのが僕個人としての本音です。

残念ながらこの日も僕はずっとUFOの運営にべったりだったので、教室の詳しい様子は分かりません。ところでUFOはというと、ばっちり動かしていました。


UFOの集客効果は絶大です。何せ、吹き抜けにファンタジーの塊みたいなものが浮遊している訳ですから、違うフロアの人も沢山足を止めて眺めていました。これまで冗談抜きに地獄のような日々でしたが、やっと報われたと思えた瞬間でした。
最後に終了して片づけを始める前に、今年のNFで各自が持ち寄ったロボット達で記念撮影。

こうしてみると、展示台数に対して説明する人数が明らかにおかしかったことを実感しますね...もう少し人員投入する必要があると思いました。
少し話は逸れますが、片づけはあっという間に終わり、僕は四日ぶりに下宿にもどりました。しかし...荷物整理が終わって時計を見ると夜中の2時半。次の日は休みのハズですが大学の補講が1限(朝8時45分)から入っていました。下宿から通うことを考えても6時半には起きなきゃならない。でも、今寝たら確実に8時間は目覚めないとカラダが言っていたので、諦めて徹夜する羽目に...ホント、NFってオソロシイ。
来年に向けて更なる改善点も見つかったことですし、来年はどうなるのか今から楽しみです。
~一日数台、機体紹介~
その①: 多脚ロボット Sechs
とある三回生が一人で作った多脚ロボット。実は6脚になる予定だったらしいですが、間に合わなかった模様です。名前の由来はドイツ語で6を表す単語です。それでも最終日には4本の脚で前後左右に歩き、もう一本の脚(見た目からすれば尻尾?)もちゃんと動きます。最新のプレイステーション4のコントローラによって操作が可能です。
その②: 汎用ヒト型決戦兵器 人造人間ヱヴァンゲリヲン 仮設初号機

3回生の二人組、Project Aによる製作。上半身はヱヴァ初号機、下半身はヱヴァ仮設伍号機と同じという、あまりにも特異なプロポーションです。ただ、金銭的な問題もあり、試験的に起動実験を行うにとどまった模様です。
上半身はKinectによって操縦者の動きを読み取り、操縦者はOculusを装着しヴァーチャルと現実との合成映像を見ることになると推測されます。下半身には足回りとしてオムニホイールを4つ装備しています。
一番驚くべきは、彼らは設計図を一切描かないこと。ペーパークラフトの要領で作ってしまうんです。今回も彼らのノートを少しのぞかせてもらいましたが、ラフぐらいしか載っていませんでした。キカイケンの中でも職人色の強いチームです。
Project Aは毎年面白いことをやってくれるのですが、今年はなんと展示教室の方にデスクトップ型パソコンと2台のディスプレイを持ち込んでいました。タクシーを使って持ってきたそうです。もう、僕は彼らの熱意にただ~脱帽するしかありませんでした...
その③: PEPA (Practice of Extraction colors for Picture Analysis)

とある3回生の製作です。名前の由来は「ヒラタペパ」という平べったい蛙に由来していて、上記の省略形ではないらしいです。キカイケンの大半の人がAVRなどのマイコンを使用する中、ただ一人 BeagleBone Black という、日本ではあまり馴染みのないシングルボードコンピュータを使用しています。有名なRaspberry Pi と同じようなものだそう。これにウェブカメラを搭載、Pythonというプログラミング言語でコーディングし OpenCV というソフトウェアで画像処理を行っています。
NF時には赤い物体に対して追跡する動作をさせていました。ただ、やはり処理が重いのか、左右方向に対する応答性が少し悪かったような印象を受けました。
その④: UFO_CATCHER MEGA

我らが京大機械研究会のシンボルといっても過言ではない、巨大UFOキャッチャーです。今年で6年目を迎えるにあたり、大幅に機体を改修。設計からやり直しました。その結果、機体の剛性は上がったのですが、今度は重量が約5kgと随分大きくなってしまいました。一応、僕が今年の大改修の現場指揮を行いました。
機体構成は大きく分けて、4階からUFOの基部を吊り下げているウィンチ部と、昇降及びものを掴むUFO本体の二台構成になっています。それぞれARMのSTMマイコンを搭載しZigbeeで通信しています。ハード、ソフト共に僕らの持つ最高技術の塊になっています。
しかし、NFの前日しかすべてのコンポーネントを繋いで動作確認することが出来ないこともあって、毎年良くて2日間しか動かせていません。来年は3日間動かせるのでしょうか?
ここまで書いてきて、写真や動画が少なすぎたことに気付きました...実際撮っている時間が全然無かったんですよ...
さて、なんとか毎回遅れながらも2015年度のNFについてレポートしてきました。毎年このような感じで波乱の連続です。自分の製作物が上手く動かず徹夜する人、ほかのサークルと掛け持ちをしているため忙しく動き回っている人など様々です。僕らのNFに対する心意気と言いますか、それに近いものが少しでも皆さんに伝われば幸いです。
これからも京大機械研究会をどうぞ宜しく御願いします。僕らキカイケンメンバーも、例え大学側のバックアップが無くても、例え他の大学と比較したら設備が劣っていようとも、キカイケンらしい着眼点と発想力でもっと「愉しいものづくり」を提案し続けようと思います。
今回のNF特集はここまでです。では、また別の機会にお会いしましょう。
(No.9)


コメント