第八回キャチロボバトルコンテストを振り返る
初めまして、京大機械研究会B3のkennzoです。
ブログ書くのは初めてですが、頑張ってまとめようと思います。
自分は主にキャチロボのハード設計と加工を担当しています。

さて、機械研は第八回キャチロボバトルコンテストに出場しました。機械研は3年前と去年にキャチロボで準優勝しており、今年もメンバー一丸となり取り組みました。
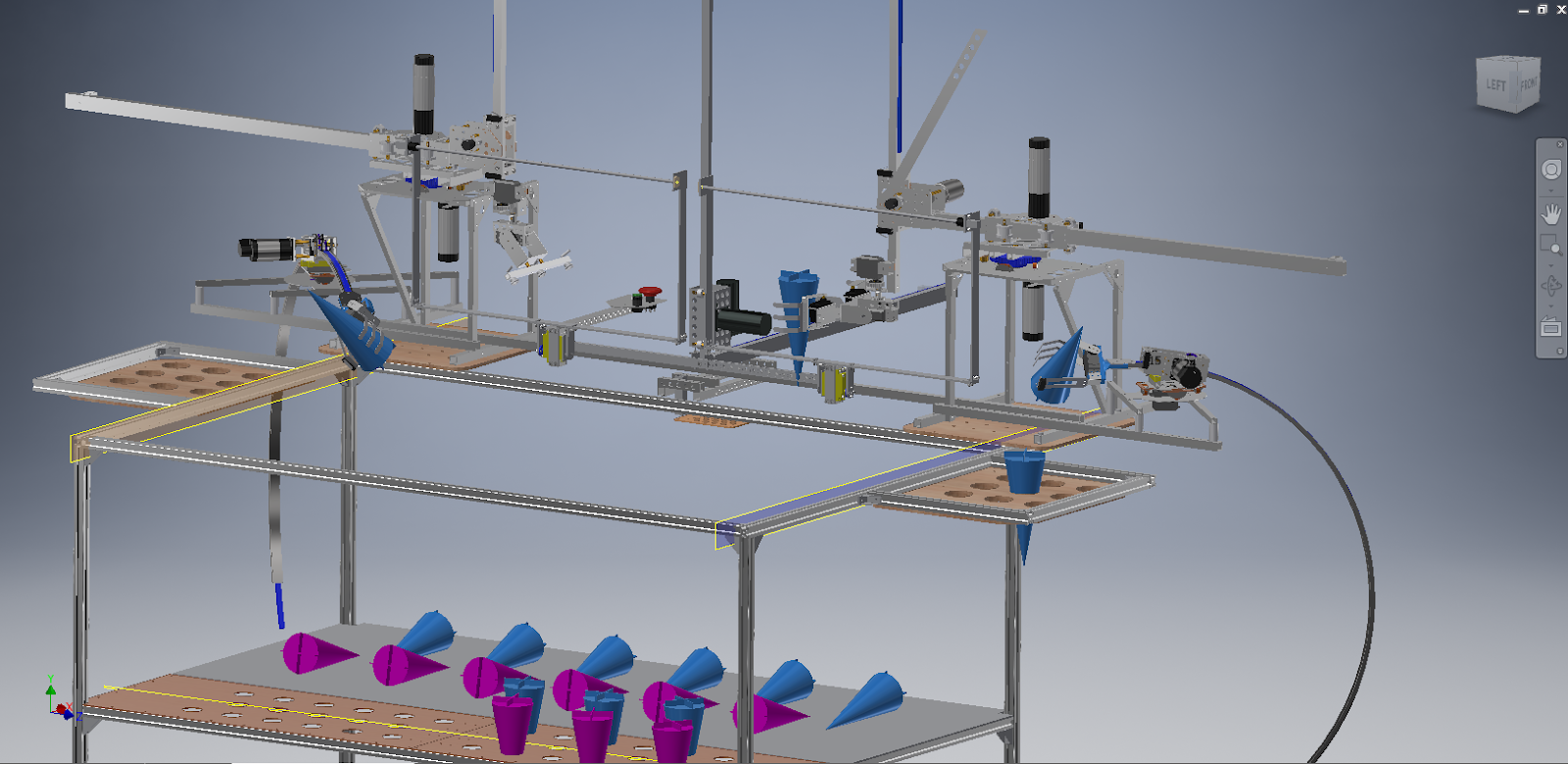
今年の機体構成です。
機体重量は15805gで重量制限16kgギリギリでした。

今年の目標は優勝ということで共通エリアのワークを試合開始後数秒で取得することを目標に開発を行いました。その結果、
① 円筒(左右二台)
② 一個鳥(左右二台)
③ 妨害装置
の三つの機構を作成。
円筒座標系のロボットは機械研では初でこれだけでも挑戦なのに、一個鳥は円弧レールの直動、妨害は摩擦の高いシートを張り付けたローラーでカプリコを引き抜くという奇策にでました。電源も今まで使用してこなかった鉛蓄電池を採用しました。回路もマイコンが三個になりそのせいでコントローラーも三個…。おかげで腰に箱をつけることになりました笑。

①円筒座標系ロボット
普通の円筒座標系のロボット。ハンドの形が特殊でなぜこうなったかを話すと長いので略。ゴムスポンジを用いることでかなり性能が上がりました。
ソフト面では円筒座標系を直行座標系に変換し制御しており、フィールド下部とシューティングボックスの移動は自動で行っていました。結構ここ頑張ってくれてたのに大会で突っ込んでくれなかったなぁ…。

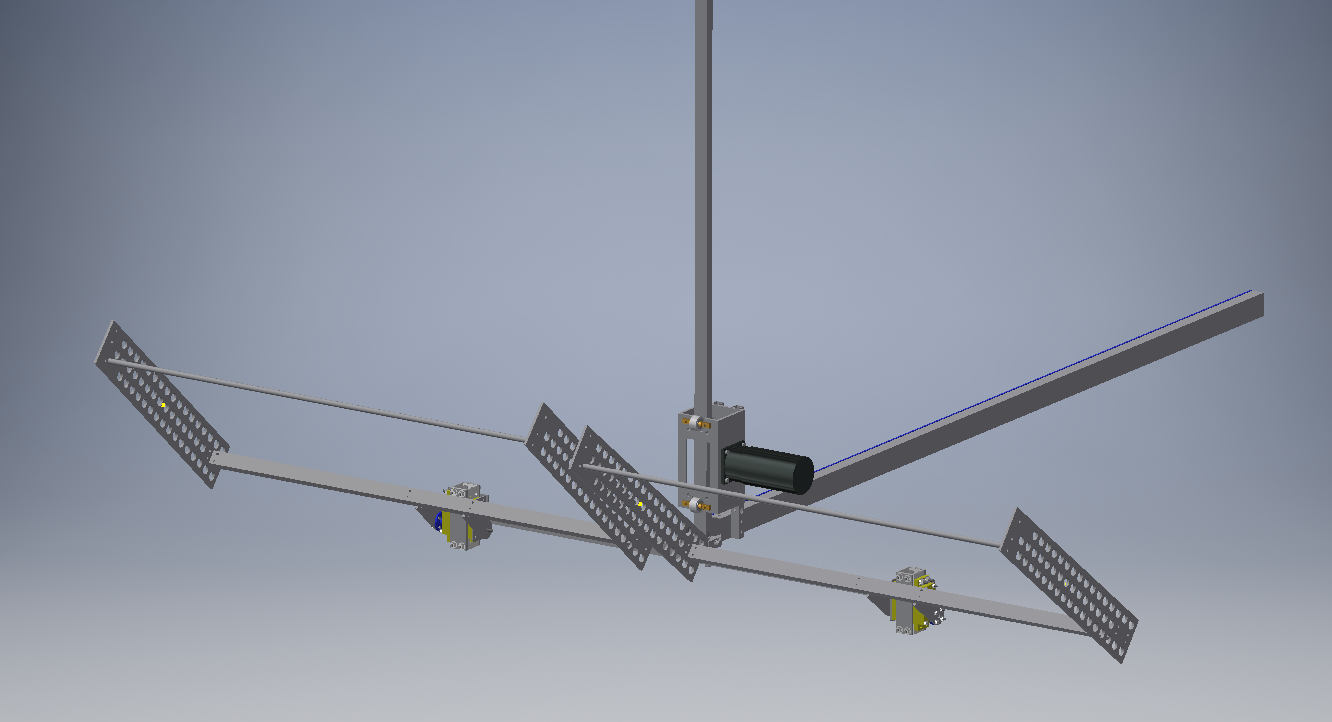
②一個鳥
mg996rを使用した片開きの簡単なハンド、占有スペース的に円弧レールを採用しました。機械研には角柱を曲げる技術が確立されていないので、カーテンレールを手曲げしラックをはることで代用しました。この機構は大会でも安定して動作し、開始3秒でワークをシューティングボックスに運んでくれました。おそらくここだけは今大会最速の自信があります。スローモーションで撮ると台形加減速が綺麗です。
動作は機械研公式Twitterで公開しているので是非ご覧ください。
https://twitter.com/MechatroCreator/status/1038734717212749824?s=19

③妨害装置
摩擦の高いシートを張り付けたローラーで共通エリアのカプリコを引き抜き、自陣に引きこんでくることが可能だったはずなんですが、調整不足でなかなかうまくいきませんでした。ここさえ動いてくれてれば…。

テストラン前日は波乱の連続でした。
エンコーダ、サーボ、MD, マイコンが死んでいき、3Dプリンタパーツが割れ、さらにはlipoが過放電…。結局搬送前日は午前4時まで作業していました。
当日もまずはフィールド寸法が間違っていたことが発覚。そもそも設置できないところから始まりました。何とかそれは修正したものの、予選では妨害装置がうまく働かず思うように点数が取れませんでした。

結果は準決勝で京都工芸繊維大学に敗れベスト4となりました。また、ハンドの形状や妨害装置の機構に高い評価をいただき特別賞を受賞しました。
今年の敗因は完成が予定より大幅に遅れ、全体を通しての練習時間が取れなかったことにつきます。やはり安定性は大事だなぁと再確認した大会となりました。この教訓を後輩たちに伝え、来年は優勝を目指してほしいと思います。そしてNHKはどうなることやら…。
最後になりますが、チームメンバー、搬送を手伝っていただいた方、運営の皆様に感謝申し上げます。本当にありがとうございました。
ブログ書くのは初めてですが、頑張ってまとめようと思います。
自分は主にキャチロボのハード設計と加工を担当しています。

さて、機械研は第八回キャチロボバトルコンテストに出場しました。機械研は3年前と去年にキャチロボで準優勝しており、今年もメンバー一丸となり取り組みました。
今年の機体構成です。
機体重量は15805gで重量制限16kgギリギリでした。
今年の目標は優勝ということで共通エリアのワークを試合開始後数秒で取得することを目標に開発を行いました。その結果、
① 円筒(左右二台)
② 一個鳥(左右二台)
③ 妨害装置
の三つの機構を作成。
円筒座標系のロボットは機械研では初でこれだけでも挑戦なのに、一個鳥は円弧レールの直動、妨害は摩擦の高いシートを張り付けたローラーでカプリコを引き抜くという奇策にでました。電源も今まで使用してこなかった鉛蓄電池を採用しました。回路もマイコンが三個になりそのせいでコントローラーも三個…。おかげで腰に箱をつけることになりました笑。

①円筒座標系ロボット
普通の円筒座標系のロボット。ハンドの形が特殊でなぜこうなったかを話すと長いので略。ゴムスポンジを用いることでかなり性能が上がりました。
ソフト面では円筒座標系を直行座標系に変換し制御しており、フィールド下部とシューティングボックスの移動は自動で行っていました。結構ここ頑張ってくれてたのに大会で突っ込んでくれなかったなぁ…。

②一個鳥
mg996rを使用した片開きの簡単なハンド、占有スペース的に円弧レールを採用しました。機械研には角柱を曲げる技術が確立されていないので、カーテンレールを手曲げしラックをはることで代用しました。この機構は大会でも安定して動作し、開始3秒でワークをシューティングボックスに運んでくれました。おそらくここだけは今大会最速の自信があります。スローモーションで撮ると台形加減速が綺麗です。
動作は機械研公式Twitterで公開しているので是非ご覧ください。
https://twitter.com/MechatroCreator/status/1038734717212749824?s=19

③妨害装置
摩擦の高いシートを張り付けたローラーで共通エリアのカプリコを引き抜き、自陣に引きこんでくることが可能だったはずなんですが、調整不足でなかなかうまくいきませんでした。ここさえ動いてくれてれば…。
テストラン前日は波乱の連続でした。
エンコーダ、サーボ、MD, マイコンが死んでいき、3Dプリンタパーツが割れ、さらにはlipoが過放電…。結局搬送前日は午前4時まで作業していました。
当日もまずはフィールド寸法が間違っていたことが発覚。そもそも設置できないところから始まりました。何とかそれは修正したものの、予選では妨害装置がうまく働かず思うように点数が取れませんでした。

結果は準決勝で京都工芸繊維大学に敗れベスト4となりました。また、ハンドの形状や妨害装置の機構に高い評価をいただき特別賞を受賞しました。
今年の敗因は完成が予定より大幅に遅れ、全体を通しての練習時間が取れなかったことにつきます。やはり安定性は大事だなぁと再確認した大会となりました。この教訓を後輩たちに伝え、来年は優勝を目指してほしいと思います。そしてNHKはどうなることやら…。
最後になりますが、チームメンバー、搬送を手伝っていただいた方、運営の皆様に感謝申し上げます。本当にありがとうございました。


コメント